Контроллер шагового двигателя
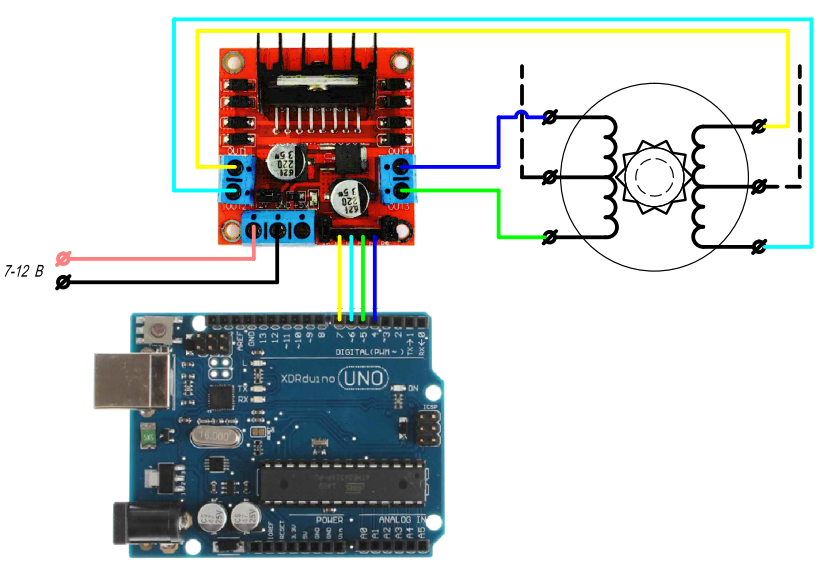
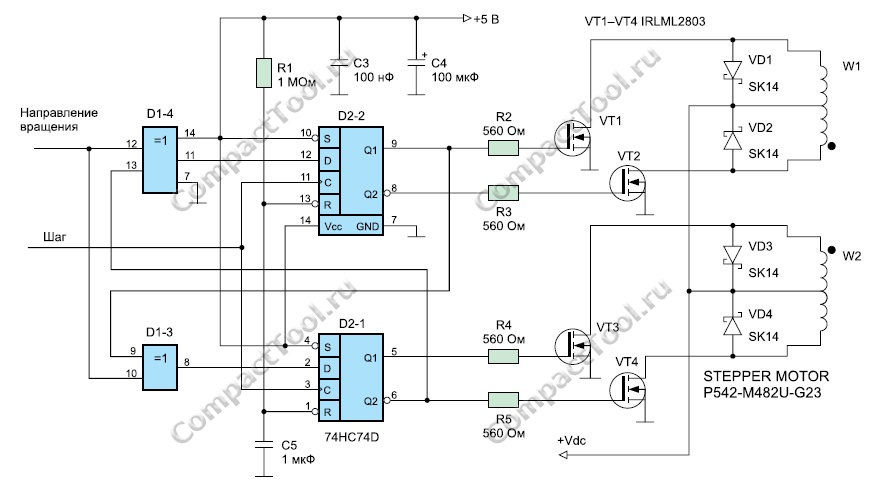
В зависимости от конфигурации обмоток двигатели делятся на биполярные и униполярные. Биполярный двигатель имеет одну обмотку в каждой фазе, которая для изменения направления магнитного поля должна переполюсовывается драйвером. Для такого типа двигателя требуется мостовой драйвер, или полумостовой с двухполярным питанием.





.jpg "Обзор драйвера A4988")





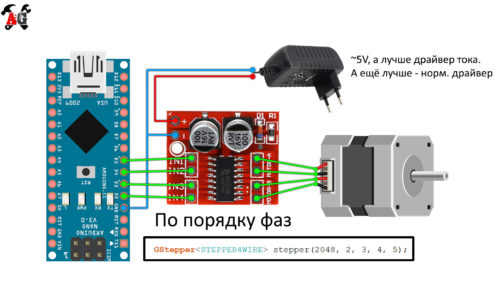
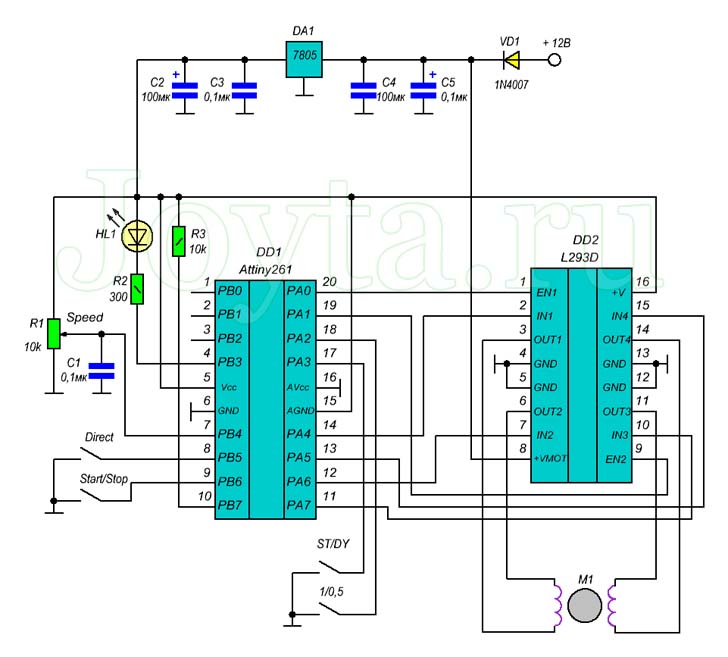
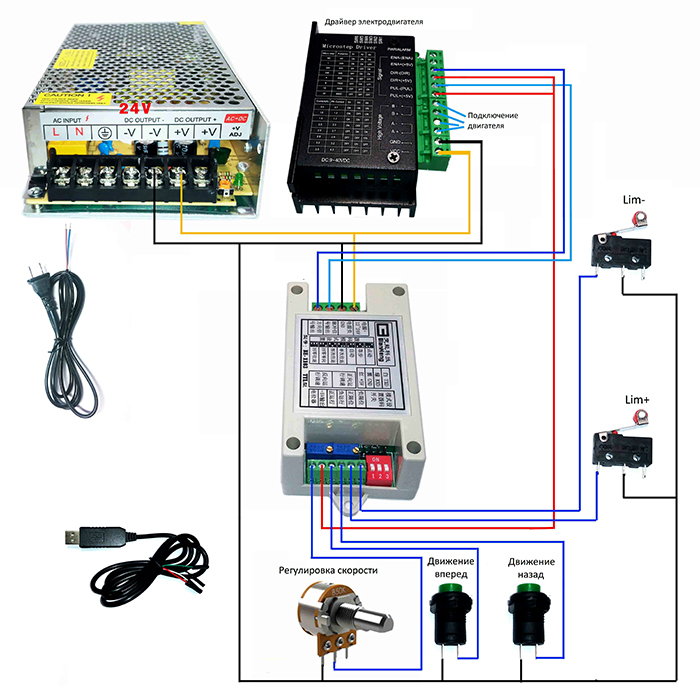
Для управления шаговыми двигателями используют специальные устройства — драйверы шаговых двигателей. Популярный драйвер шагового двигателя А работает от напряжения В и может обеспечить ток до 1 А на фазу без радиатора. Рисунок 4. Схема подключения для управления скоростью и направлением движения. База знаний.

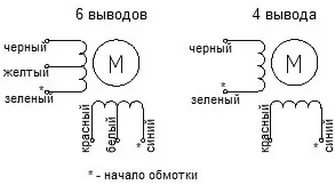


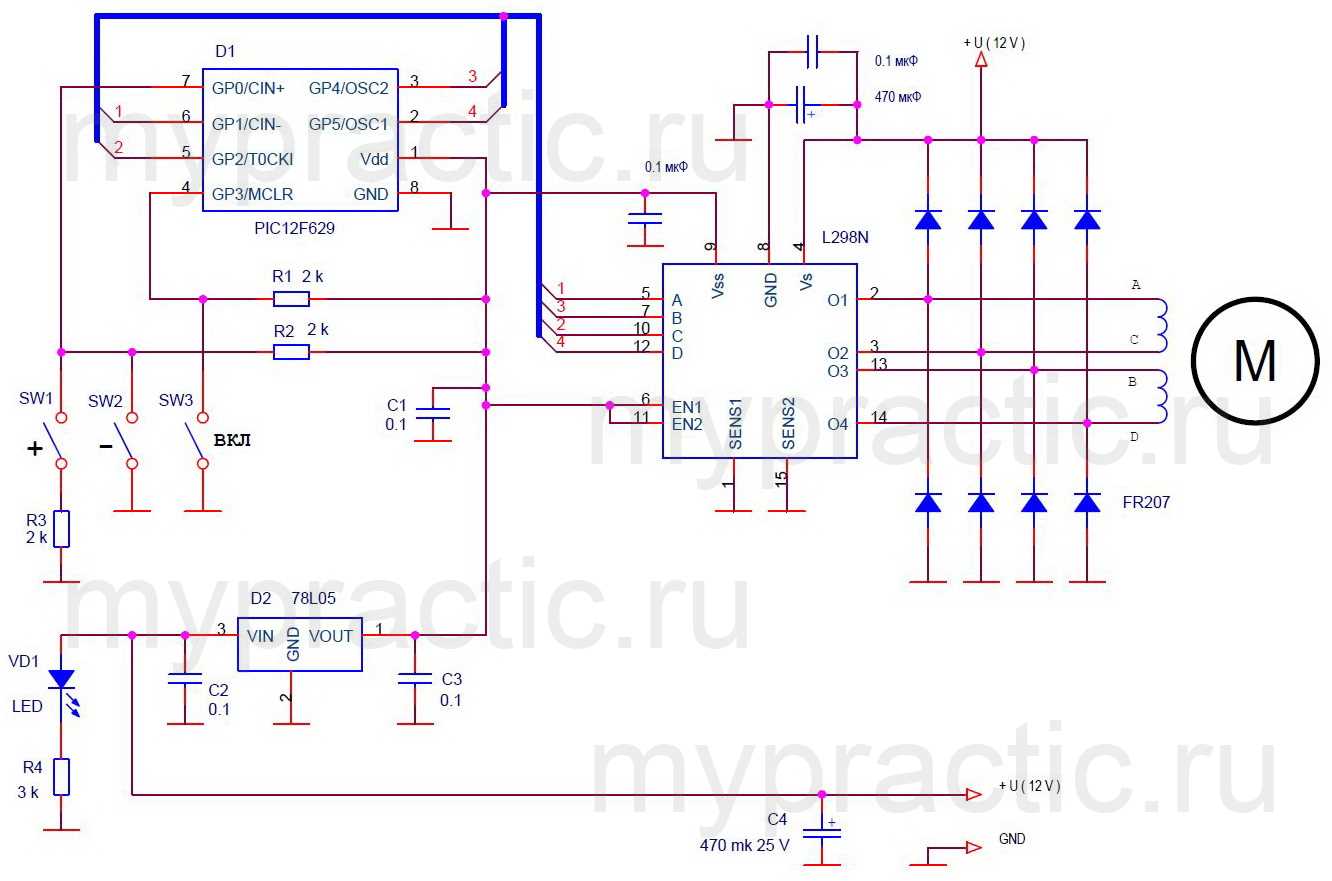
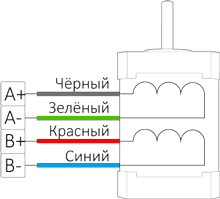
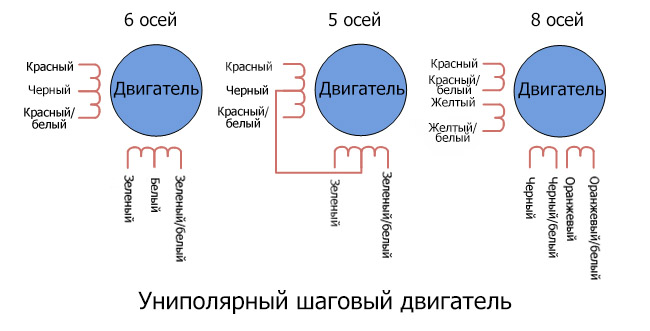
Современные шаговые двигатели, гибридые либо ШД на постоянных магнитах, как правило, производятся с двумя обмотками 4 вывода , с двумя обмоткми и центральными отводами 6 либо 5 выводов и с четырьмя обмотками 8-ми выводные ШД. Биполярные двигатели имеют две обмотки и, соответственно, четыре вывода. Униполярные двигатели также имеют две по обмотки, но у каждой из них есть центральный отвод, что позволяет использовать для управления двигателем простой униполярный драйвер т.